The University of Manchester are developing innovative robotic solutions to carry out inspections and maintenance in hazardous environments and confined spaces
Underground reservoirs
Utilising innovative robotic technology, it is possible to inspect the structures of clean-water underground reservoir structures, which reduces need for divers in hazardous spaces, whilst also improving the efficiency of maintenance tasks.
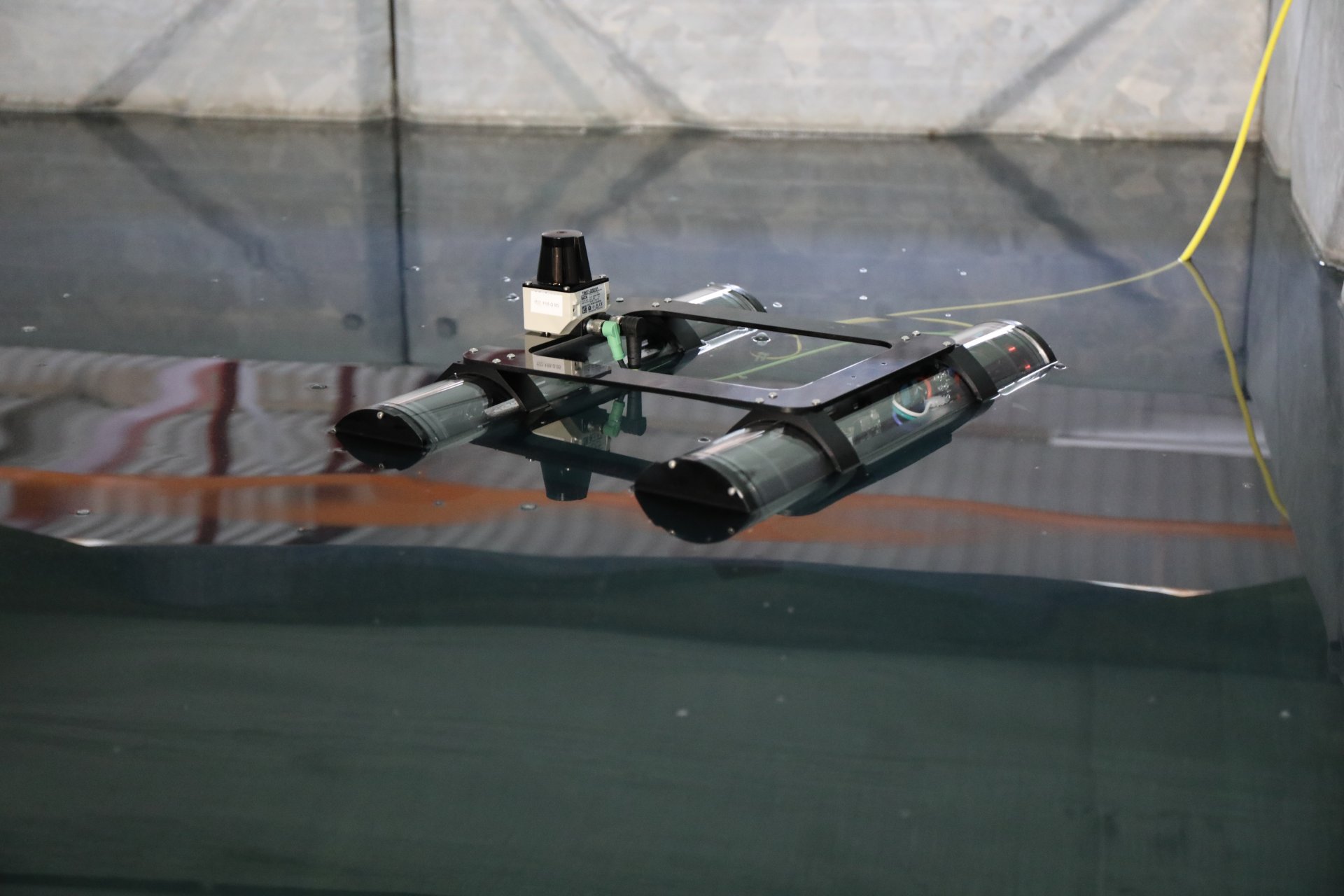
Using the autonomous robotic boat system, MallARD, it is possible to navigate across the surface of the water within the reservoir. A repetitive “lawn-mower” type pattern can then be programmed into the robotic boat, which is resistant to currents and obstacles in its path, allowing the system to travel up and down the entire length of the reservoir, adapting the defined path based on structures in its way.
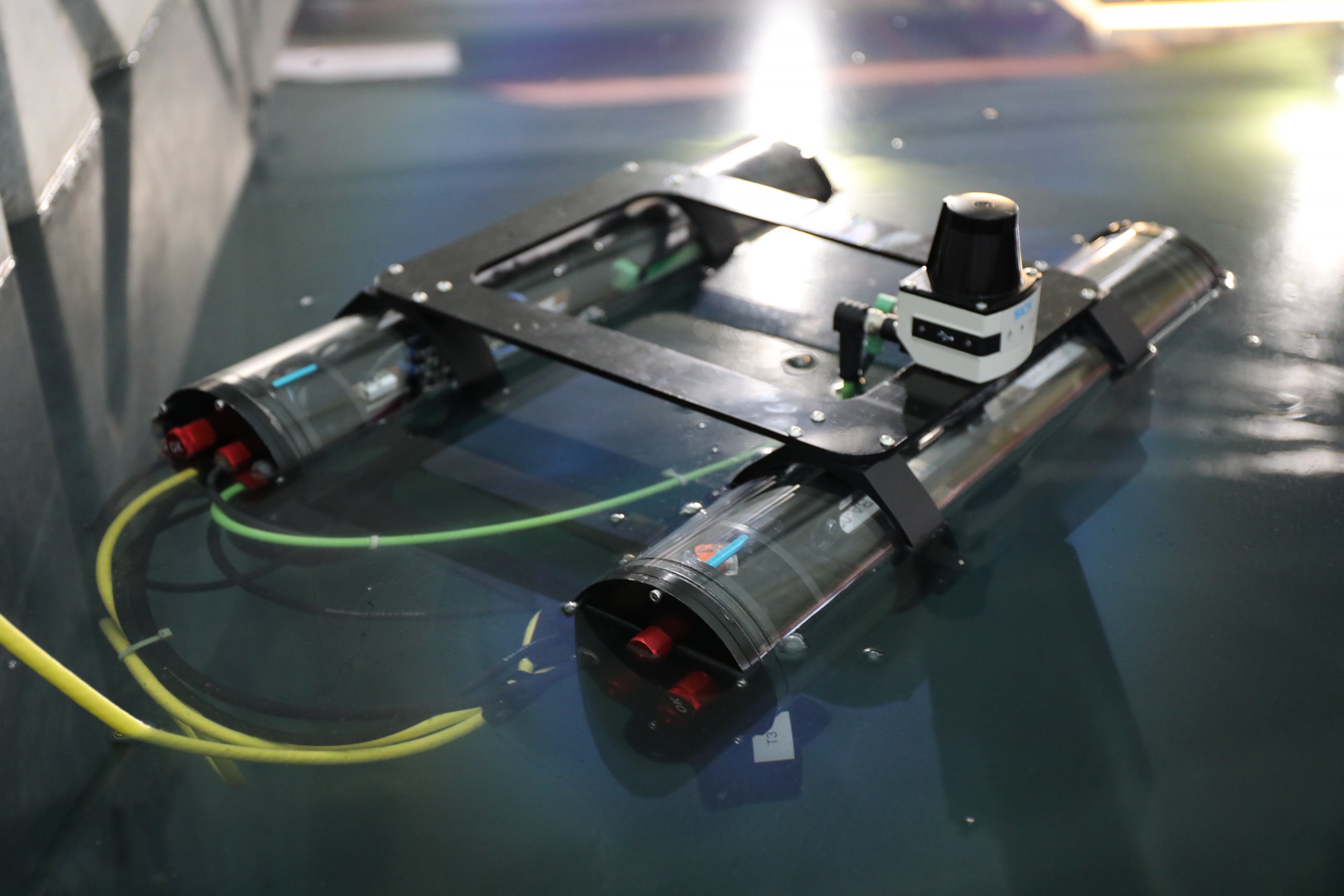
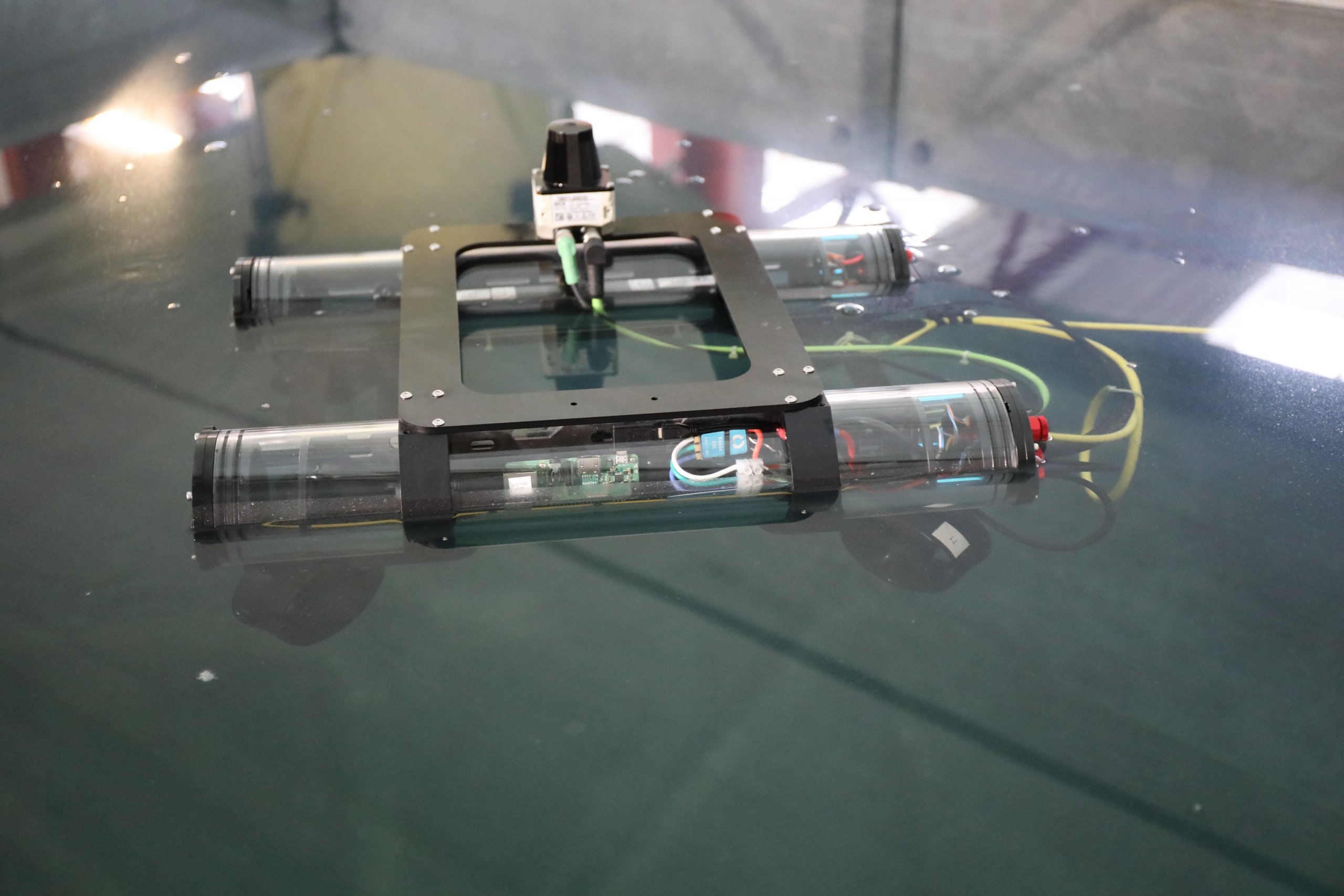
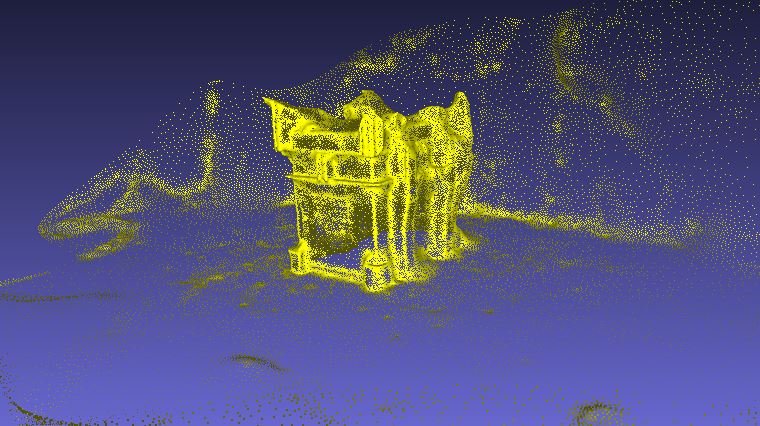
Using laser-scanning and robust simultaneous localisation and mapping software, the robotic system knows exactly where it is within the environment, offering reliable and trustworthy data to inspection or survey engineers.
A high-resolution camera and various environmental sensors placed as a payload on the system, can highlight areas of concern in the roof structure. Such as development of rust, cracks or blemishes that could affect the cleanliness of the water, leading to water wastage and the need to take the reservoir out of service.
Submerged silos
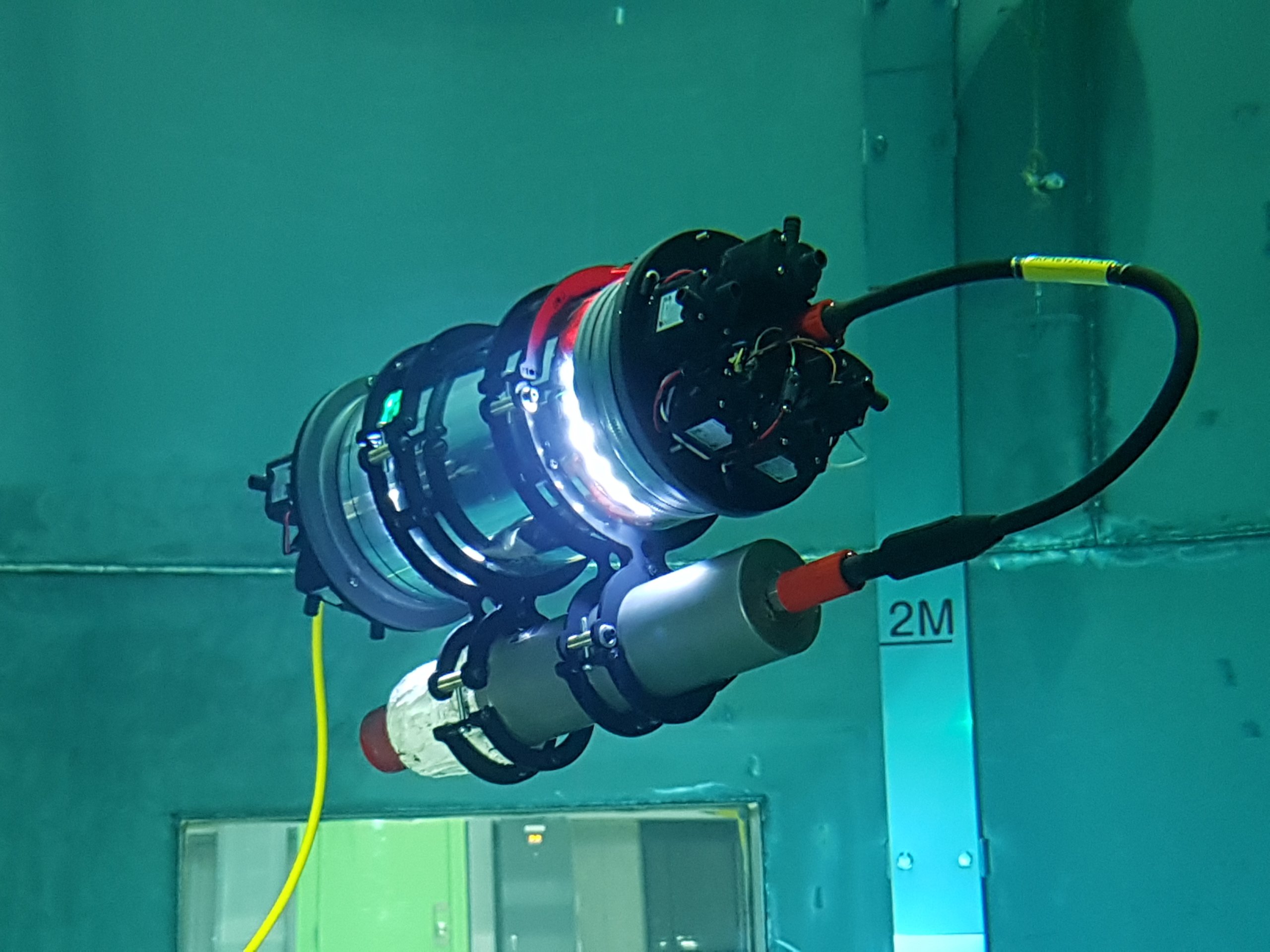
With robotics, it is possible to inspect underwater structures in silos or tanks with small cross-section access ports or confined spaces. The AVEXIS® is a submersible ROV, with an outer diameter of less than 6”/150mm, allowing it to be passed through a small access port into a larger tank or silo, a payload of 1kg, enabling a range of different sensors to be attached and 3 degrees of freedom for increased manoeuvrability.
The stock, in-built sensors normally consist of a high-resolution camera with underwater lighting, twinned with a radiation sensor, offering inspections of submerged nuclear storage facilities, silos or collapsed structures. Where inspection/ maintenance tasks are normally expensive, invasive and time-consuming.


Various environmental sensors can also be added to the submersible, including radiation sensors, thermometers, ultrasonic thickness gauges, pH meters and sonars.
The AVEXIS has been demonstrated in Japan, as part of a collaboration developing techniques to decommission the Fukushima Nuclear Power Plant, and is constantly developed to improve its capabilities.
Complimentary localisation and positioning systems are also under development to improve on current acoustic techniques that do not work well in cluttered, enclosed environments.
Confined spaces
Inspection and maintenance of hard to reach areas often require confined space training, which is an inherently unsafe and expensive process, potentially leading to injuries and inefficient use of time and resources. But it is integral for the safety and longevity of various structures.
Using remotely operated vehicles (ROV), it is possible to access confined spaces in various civil infrastructure environments such as basements, behind manufacturing equipment, through manhole covers and bridges.


The VEGA robotic platform is a tracked, ground-based ROV, capable of combining a variety of end-user defined sensing technologies to characterise a confined space, or an area through a confined space access. This can lead to informed and up-to-date digital twins.
Utilising laser scanners, 3D reconstructions can be completed, offering surveyors and design engineers insight into the need for additional structures or maintenance. The addition of environmental sensors such as thermometers, chemical sensors, ultrasonic thickness gauges and radiation sensors offer accuracy and reliability to the inspection.
The VEGA has been designed to radiologically characterise ducts underneath radiation labs, take swabs/samples and, with the swapping of a radiation sensor for a variety of sensors, it could offer valuable insight for industrial surveyors, civil engineers decommissioning experts.